Вибро робот из любого мобильного своими руками

Один автор придумал очень интересный вариант, как можно сделать робота при помощи любого мобильного телефона. Для этих целей понадобится минимум материалов и знаний, также нет никаких ограничений в плане внешнего вида и конструктивных особенностей. Такого робота может сделать любой у себя дома.
Материалы и инструменты:
— любой мобильный телефон с исправным «вибратором»;
— тонкая стальная проволока или скрепки;
— губка;
— паяльник;
— плоскогубцы.
Процесс изготовления:
Шаг первый. Изготовление составляющих конструкции
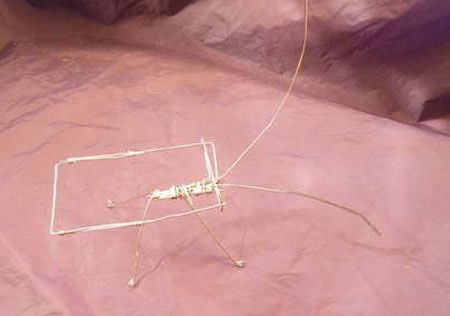
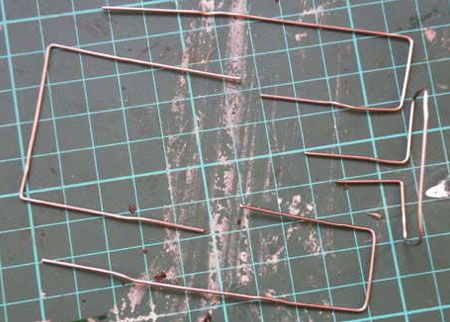
Нужно взять проволоку или большие скрепки и выгнуть их по контуру мобильного телефона. В итоге должен получиться каркас, на котором телефон сможет уверенно лежать. В качестве примера используется телефон типа «раскладушка».
Шаг второй. Сборка каркаса
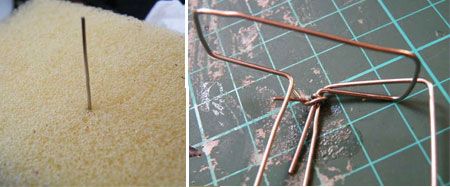
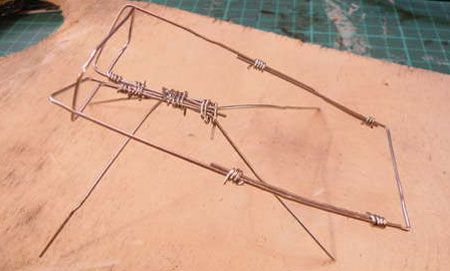
Когда составные элементы готовы, можно приступать к сборке. Собирается каркас методом скручивания проволоки при помощи плоскогубцев. Для удобства резки можно использовать губку. Проволока просто втыкается в губку, а затем ее можно легко резать на любые размеры.
Шаг третий. Приделываем ноги и тестируем робота
Ноги нужно припаять к каркасу. Затем при помощи паяльника на концах ног робота нужно сделать небольшие шарики, они нужны для того, чтобы робот скользил по поверхности. Также лапки можно просто аккуратно загнуть на концах плоскогубцами.
Чтобы сделать робота интереснее, ему можно припаять усы и так далее, здесь уже все зависит от фантазии.
Чтобы робот начал работать, на него нужно положить телефон с включенным вибратором. При этом робот начнет плавно перемещаться по столу, дрожать и шевелить усами.
Источник

Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
Как Сделать Робота Из Старого Телефона. Мир робототехники. informatik-m.ru
как сделать робота из старого телефонаКак сделать робота из телефона Motorolla





Откровенно говоря, я бы не отказался от подобного робота на полке. Согласитесь, вещица сразу притягивает к себе внимание, а представьте удивление своих друзей и знакомых, когда вы им сообщите, что сделали этого робота своими руками. =)
В общем, работа очень достойная и аккуратная. У меня вызывает просто бурю приятных эмоций. Надеюсь, что и вы к данной работе не останетесь безразличны. =)
Вдохновения и удачного моддинга друзья. С наступающим новым годом. С уважением, Casemods.
Как сделать сигнализацию из мобильного телефона? Инструкция
Поделиться ВКонтакте
Привет Лайфхакеры! Продолжаем транслировать интересные темы из еженедельного электронного журнала. В журнале мы пишем о полезных гаджетах, удивительных изобретениях, чуть-чуть заглядываем в будущее, а так же даем советы разной степени полезности. Подписывайтесь на журнал и читайте все содержание, но сначала прочтите совет, как сделать из старого телефона сигнализацию. Например, автомобильную.

В современном городе, да и не только в городе, очень часто приходится оставлять свой автомобиль без присмотра на неохраняемых парковках, или просто на улице вне поля зрения. В этом случае, даже если при вскрытии машины злоумышленником сработает штатная сигнализация, вы ее не услышите.
Вот было бы здорово, если автомобиль, при попытке его угнать, сам позвонил бы на ваш сотовый телефон!
А почему бы и нет! Надо только научить свою машину пользоваться мобильником.
Сделаем это с помощью пошаговой инструкции.
Наверняка у вас где-то в куче хлама валяется старый мобильный телефон, а то и два.
Шаг 1
Берем телефон, у которого есть функция быстрого набора номера (это условие обязательно).
Шаг 2
Разбираем телефон. Вырезаем на клавиатуре отверстие над кнопкой с цифрой «2» и припаиваем к контактным площадкам этой кнопки два провода (для имитации нажатия кнопки при замыкании проводов). Собираем телефон.
Шаг 3
Соединяем аккумулятор с телефоном при помощи пары проводов, соблюдая полярность. Параллельно припаиваем выход автомобильного зарядного устройства.
Шаг 4
Покупаем новую сим-карту и устанавливаем ее в телефон.
Шаг 5
Записываем номер своего мобильного телефона, активируя его быстрый набор в телефоне автомобиля. В настройках телефона автомобиля отключаем звонок, и индикацию.
Шаг 6
Зарядное устройство подключаем к автомобильному аккумулятору с помощью двух проводов, соблюдая полярность.
Шаг 7
Провода, идущие от кнопки через дополнительный переключатель, подключаем к концевику водительской двери (дополнительный переключатель нужен для оперативного отключения функции охраны).

Итак, сигнализация готова!
При открытии двери сразу придет вызов на Ваш мобильный телефон, и вы поймете, что кто-то залез в машину. Кроме того, по сигналу с автомобильного телефона можно определить ее местонахождение.
Такие сигнализации способны работать не только на авто, но и на любых других объектах, таких как дачи, гаражи, и т.д. Надо только предусмотреть, от чего запитать устройство.

Правда, не во всех случаях сигнализация может помочь.
Для чего бы вы использовали такую сигнализацию? Ее ведь можно использовать и как информационную систему, звонящую, например, когда кто-то открыл дверь холодильника.
Ждем комментариев и идей охраняемых объектов, даже самых бредовых.
А также рекомендуем прочитать в нашем журнале про миникомьютер за 25 долларов и что он может, о ручке-массажере и о том, какие телефоны как ведут себя в морозы.
Еще проще будет сразу подписаться на наш журнал и не пропускать ничего.
Что можно смастерить прикольного из ненужных мобильников.
Рыжее Солнце Искусственный Интеллект (175463) 2 года назад
Если есть старый, ненужный мобильный телефон с встроенной фото-камерой, то из старого телефона можно сделать простой сканер штрих-кодов. Я видел в интернете программу, которая при установке в мобильном телефоне переводит штрих-код с фотографии мобилки в нормальные цифры.
Сделав из старого телефона сканер штрих-кодов можно подарить телефону вторую жизнь.
Можно сварить яйцо, поместив его между двух телефонов в момент связи. А вообще лучше продать или отдать тому кому нужнее)
Я смотрел по галилео что из телефона и радиоприемника можно сделать металлоискатель. телефон создает волну, тем самым воздействуя на приемник, а метал искажает эти частотные звуки
Заняться программированием микроконтроллеров и сделать охранную сигнализацию по GSM на дачу, в квартиру и в машину.
Когда у меня не было веб-камеры, я сделала веб-камеру из одного своего телефона. Необходимо было закрепить телефон в удобной точке, подсоединить к нему usb кабель, и установить программу на компьютере. Таким же образом можно сделать камеру для слежения тех, кто подходит к двери или к дому. Но для этого потребуется длинный usb кабель, желательно высокоскоростной. Его можно купить в китайском интернет-магазине с пометкой high-speed.
Мне больше всего понравилась идея сделать из старого мобильника противоугонное устройство для автомобиля. Инструкции, как это сделать можно найти в сети интернет.
Ещё из ненужного мобильного телефона можно сделать подслушивающее устройство, а при наличии камеры на вашем сотовом — и подглядывающее.
Вот список вещей которые можно сделать из мобильника:
У меня новый смартфон! А что делать со старым?
Поделиться ВКонтакте
Еще совсем недавно, каких-то 5-6 лет назад, умный телефон был доступен только немногочисленному количеству технически продвинутых и, что немаловажно, обеспеченных пользователей. Потом цены смартфонов стали быстро снижаться, а возможности — увеличиваться, так что сегодня их можно увидеть в руках и пионеров и пенсионеров. А многие из нас успели за это время сменить несколько моделей, так что вопрос утилизации старых устройств встает все более остро. Раньше можно было легко продать б/у модель или отдать-подарить нуждающимся родственникам. Сегодня же все чаще вполне рабочие аппараты находят свое последнее пристанище где-то в дальнем углу ящика стола.
В этой статье вы найдете несколько советов, как дать этим устройствам вторую жизнь и применить с пользой для дела. Итак, достаем своих любимцев, сдуваем пыль и снова в бой!
Комнатный будильник
Источники: http://www.prorobot.ru/myrobot/make_robot_from_telephone.php, http://masterkit.lifehacker.ru//02/22/kak-sdelat-signalizaciyu-iz-mobilnogo-telefona-instrukciya/, http://otvet.mail.ru/question/87993305, http://lifehacker.ru//06/03/u-menya-novyj-smartfon-a-chto-delat-so-starym/
Комментариев пока нет!
informatik-m.ru
Как сделать робота с Bluetooth управлением и потоковым видео
Перевел SaorY для mozgochiny.ru
Доброго дня, мозгочины! Знаете, как создать своими руками небольшого робота, даже не робота, а ровера, да еще с опцией потокового видео? А вот как!
Этот мозгоровер, марсоход, робот-шпион, можно называть его как угодно, управляется с вашего смартфона, отправляет потоковое видео с установленной на него камеры и состоит простых электронных компонентов, таких как Arduino, модуль Bluetooth, и пары моторчиков. Ну что, начнем!
Шаг 1: Компоненты и инструменты
Для создания поделки-ровера понадобится:
• база робота (любой подходящей конструкции)
• редукторный двигатель — 2шт.
• колесо – 2шт.
• колесико-подставка
• винты, отвертки
• Arduino
• модуль Bluetooth (Я использовал HC-06).
• плата Dual H-bridge (я использовал L298).
• аккумулятор на 7.2В
• макетная плата и провода с разъемами
• Android-смартфон (используется в качестве IP-камеры)
• другой Android-смартфон для управления
Шаг 2: Сборка базы
Берем в руки детали базы, собираем ее и закрепляем винтами. Затем на собранную базу устанавливаем моторчики, крепим винтами, а потом на валы надеваем колеса.
Для устойчивости на базу устанавливаем дополнительное колесико-подставку, а завершаем сборку мозгобазы монтажом верхней части базы.
Шаг 3: Установка Arduino
С помощью мозгоотверток и винтов крепим Arduino и макетную плату на верх базы.
Шаг 4: Установка Dual H-bridge
На макетную плату монтируем Dual H-bridge, и проводим подключения с помощью проводов, ориентируясь при этом на фото и нижеследующую распиновку:
1 — Gnd, масса
2,3 — моторчик №1
4 — питание мотора (батарея), Vin на Arduino
5 — контакт 5 на Arduino
6 — питание 5В
7- контакт 6 на Arduino
8 — Gnd
9 — питание 5В
10 — контакт 10 на Arduino
11 — питание 5В
12 – контакт 11 на Arduino
13,14 – моторчик №2
15 — Gnd
Шаг 5: Подключение модуля Bluetooth
Монтируем модуль на макетную плату, а затем соединяем:
• TX модуля Bluetooth и RX на Arduino
• Vcc модуля Bluetooth и Vcc на макетной плате
• Gnd модуля Bluetooth и Gnd на макетной плате
Шаг 6: Установка аккумулятора
Находим подходящее место для монтажа на самоделку аккумуляторной мозгобатареи, устанавливаем ее и закрепляем.
Шаг 7: Монтаж камеры
В качестве камеры выступает Android-смартфон, поэтому берем его и крепим на ровер с помощью какой-либо подставки для смартфона, или как я, с помощью длинного винта.
Шаг 8: Код для Arduino
Подключаем самоделку к ПК и загружаем приложенный код rover, но сначала рекомендую ознакомится с ним, там ничего сложного.
Шаг 9: Настройка Android
На смартфонах, один из которых установлен на поделку, включаем Wi-Fi и «коннектим» их. После этого загружаем приложение «IP-камера» на смартфон ровера, а на управляющий смартфон закачиваем «BT Controller» из приложенных файлов BTController, а далее:
• запускаем приложение, прокручиваем вниз «start server»
• копируем предоставленный IP и добавьте «/browserfs.html» в конец линии, чтобы получилось примерно так http://192.168.1.8:8080/browserfs.html
• запускаем «BT контроллер» на другом устройстве
• нажимаем «Select Robot» и выбираем свой модуль Bluetooth, затем соединяемся с ним ( пароль по умолчанию 0000 или 1234)
Самоделка готова к действиям 😀
Шаг 10: Отладка
Возможно, придется провести некую отладку, например:
• если мозгоровер двигается не правильно, то нужно поменять местами провода на моторчике, идущие от H-Bridge;
• если не получается получить чистую картинку от приложения «BT Controller», то строку можно вставить без «/browserfs.html» и заново подключиться, тогда браузер будет отображать картинку другого, более популярного расширения.
После этого подключаем аккумуляторную батарею к Arduino и запускаем его, проверяем как работает самоделка и камера, если снимаем себя, то теперь, когда мозгоподелка полностью собрана, можно выглядеть как босс 😀
Надеюсь было полезно и удачи!
(A-z Source)
ПОДЕЛИТЕСЬ С ДРУЗЬЯМИ!
About SaorY
mozgochiny.ru
Простой робот шпион своими руками
Приветствую, Самоделкины!Сегодня мы с вами сделаем маленькую машинку на радиоуправлении причем не просто машинку, а самый настоящий шпионский девайс.


Автором данной самоделки является AlexGyver. Итак, давайте начнем. Значит смотрите, есть вот такой модуль передатчика на 315 МГц в виде пульта на четыре кнопки и к нему приемник с четырьмя логическими выходами под каждую кнопку.
Работает это все весьма очевидным образом: кнопку нажали 5 вольт на соответствующем выходе получили. Уже хороший потенциал для arduino проектов. Также есть драйвер для 2-ух моторчиков на микросхеме mx1508.
Компоненты для робота (ссылки на Aliexpress):
Пульт и приёмник
Драйвер моторов
Диоды 1N4004
Моторчик мини (200 RPM)
Моторчик большой
Повышайка до 5В
Аккумуляторы 18650
Батарейный отсек (2x)
Тумблер
Макетка
Танковое шасси
FPV:
Камера 3 в 1
FPV часы
Крутой дисплей
Менее крутой
FPV OTG приёмник
FPV шлем
FPV очки

Это современный практически аналог старому хромому l298. С ним тоже все очень просто, подключаем 2 моторчика и логическим сигналом вращаем их в одну или другую сторону.

И нет ничего проще, чем соединить эти 2 модуля и получить управление машинкой по танковой схеме. Осталось только придумать, как подключить приемный модуль драйвера моторчика так, чтобы двигатели включались как нам нужно, то есть логика передачи сигнала должна быть примерно вот такая, соответственно кнопкам на пульте.


Схемы для каналов по отдельности работают замечательно, но хочется все сразу. Очевидно, что просто взять и подключить все провода как есть нельзя, так как каналы управления будет мешать друг другу и моторчики просто не будут крутиться, если еще ничего не сгорит конечно. Нам нужно защитить каналы управления от взаимного влияния и замыкания. И тут на помощь придут обычные диоды, которые пропускают ток только в одном направлении.

И вот в таком виде схему уже можно совмещать. Слегка оптимизируем для компактности и большей наглядности, ну и останется нам подключить питание, например, от пальчиковых батареек и моторы, можно еще добавить выключатель, но к сожалению, все оказалось не так просто.


У китайцев есть замечательные готовые мотор-редукторы для самодельных роботов. Продаются они сразу с колесиками. А еще есть micro мотор-редукторы, мы буду использовать их, так как хотим сделать мини робота шпиона.


Но для первого теста давайте припаяем большие моторы, и для проверки соберем схему на макетной плате. Берем диоды и подключаем все по схеме.

Ну как-то так. Мотор-колеса закрепим на двухсторонний скотч по принципу и так сойдёт — это же макет.
Питаться будем от 4-х пальчиковых батареек. Сразу натянем на колёса антискользящие покрышки из колечек от велосипедной камеры. Поехали!

Но лыжи не едут. При удержании кнопки машинка движется рывками, а на тесте со светодиодами мы видели, что сигнал выдается постоянный без рывков, то есть по логике, машинка должна ехать ровно пока нажата кнопка, но этого почему-то не происходит. Давайте разбираться. Начнем с того, что китайцы припаяли антенну на передатчик и не припаяли на приемник. Не, по сути антенна есть в виде дорожки на плате:

Но антенна — это тот самый случай, когда размер все-таки имеет значение. Давайте сделаем свою антенну. Для этого понадобится обычный провод, например, из интернетного кабеля.

Длина антенны обычно берется равной 1/4 длины волны, так называемый четвертьволновой вибратор. Частота радиосвязи у модуля 315 МГц, переводим частоту в длину волны по школьной формуле через скорость света, делим на 4 и получается 23 с хвостиком сантиметра.

Вот кстати табличка из интернета для разных частот.

Как видите, мы все делаем правильно. С такой антенной наш робот не будет шпионом, потому что будет торчать слишком длинный палевный кусок провода.

Антенну можно скрутить в спираль. Судя вот по этой картинке из интернета, мотать можно на 4мм.

Возьмем сверло соответствующего диаметра и намотаем на него нашу антенну, а затем припаяем ее к плате.


Справиться с высоким стартовым током нам поможет конденсатор параллельно питанию.

Проверяем.

Вблизи от антенны схема работает стабильно. Наверное, проблема все-таки в питании, идет помеха от моторов, так как при раздельном питании моторов и приемника схема работает так как было задумано.
Добавим конденсаторов электролитических и керамических, чтобы сгладить стартовые толчки.
Но все равно ничего не получилось. Будем делать раздельное питание. Один литиевый аккумулятор формата 18650 на питание моторов и еще один на питание радио. Также поставим повышающий преобразователь до 5В, потому что радио работает от 5В, от аккумулятора уже не работает. Для включения питания возьмем двойной тумблер.

Все эти компоненты продаются на Aliexpress. Быстренько пересобираем схему и проверяем ее на работоспособность.
И она черт возьми работает. Вашему вниманию представлена самая простая и дешевая самодельная машинка с пультом дистанционного управления. По питанию радио-модуль автор все-таки поставил пару конденсаторов. Работает идеально.
Наш робот будет построен на базе батарейного отсека и маленьких моторчиков. Схема абсолютно такая же как раньше, но для удобства будем собирать на макетной плате.


Вот такая в принципе несложная получается сборка.

Далее берём маленькие моторчики и приклеиваем к батарейному отсеку. Суперклей отверждаем обычной пищевой содой, он сразу застывает и образует весьма прочный полимер, которой крепится очень прочно.


Колесами будут обычные крышки от бутылок.

Ведущие колеса сделаем по диагонали, так будет компактнее и машинка лучше поворачивает, но хуже преодолевает препятствия.

Также нам нужны еще 2 колеса, которые будут просто крутится. Закрепим их во втулке из карандаша, он хорошо подошел по размеру. Ось будет из винтика м3, поэтому рассверливаем отверстие на 3мм, собираем и приклеиваем на суперклей.


Обязательно делаем покрышки из вело камеры иначе не поедет. Резину ставим только на ведущие колеса иначе опять же может не поехать.


Ну и как же наша мини машинка шпион без мини-камеры. Автор взял мини камеру для квадрокоптера и Eachine tx-02 3 в 1 (камера + передатчик + антенна).

Камера питается от напряжения от 3 до 5В и шлет видео сигнал на частоте 5,8ГГц. Запитаем ее от аккумулятора, от которого питается приемник пульта.


Таким образом, моторы не будут давать помехи на видеосигнал. Крепим на двусторонний скотч и резиночку.

Принимать видеосигнал можно на несколько разных китайских устройств. Есть вот такой крутой дисплей со встроенным приемником и встроенным аккумулятором, также в него можно вставить карту памяти и записывать на нее то, что снимает камера.

У автора к сожалению, его нет, но штука реально клевая и удобная. Второй вариант чуть меньше, но прям то что нужно для нашей шпионской тачки.


Это маленький дисплей с приемником и аккумулятором, при чем не просто дисплей, а часы с 2-х дюймовым дисплеем. Таблицы каналов видеосвязи кодируются четырьмя буквами и восемью цифрами.

Канал должен совпадать на передатчике и на приемнике. На передатчике у нас канал с номером А8, изменить можно кнопочкой.

А на часах есть шкала. Кликами и удержанием кнопки можно установить номер канала А8.

Все, есть контакт. Можно начинать слежку.

Третий вариант, в принципе самый дешевый, это такой приемник для смартфона, качаем специальную программку, открываем, подключаем, разрешаем, включаем питание на передатчике видео, на приемнике нажимаем и удерживаем кнопку и начинается сканирование диапазона.
После чего автоматически будет выбрана лучшая частота и можно работать с нашей системой видеонаблюдения.
Самое клёвое то, что можно записать видео прямо в память телефона.

На сегодня это все. Благодарю за внимание. До новых встреч!
Видео:
Источник
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
Миниатюрный робот Microbot своими руками

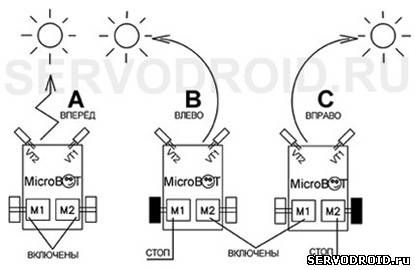
Робот Microbot является простым маленьким роботом, которого можно изготовить своими руками. Его высота составляет порядка 12 мм, ширина 20 мм, а длина печатной платы всего 35 мм. Особенность такого робота в том, что он умеет двигаться за источником света. Стоит перед роботом засветить фонариком, он тут же начинает двигаться к свету, это чем-то напоминает игру с кошкой лазерной указкой. Также робот реагирует и на солнечные лучи, поэтому бывает сложно предположить, как он себя будет вести. Передвигается робот только на ровной гладкой поверхности.
В качестве «мышц» робот использует миниатюрные моторчики, которые можно найти в старых мобильных телефонах.
Устройство робота и функции:
В техническом плане робот состоит из двух печатных плат разных по размеру. Платы соединяются при помощи припоя. На поверхности робот удерживается благодаря трем точкам опоры, при этом две точки опоры — это валы моторчиков, они и двигают робота. Так как размеры робота небольшие, то в качестве питания здесь используется плоская батарейка с питанием в 3В.
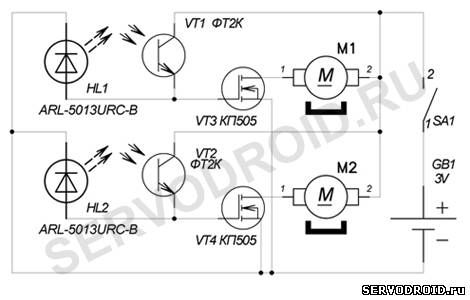
Свет робот чувствует очень сильно. Робот отлично улавливает не только прямое попадание света на него, но также видит тот свет, который исходит от светового пятна.
На роботе установлено два светодиода. Если посветить с правой стороны от самоделки, робот начинает двигаться вправо и на нем загорается правый светодиод. Соответственно если светить с левой стороны, то загорается левый светодиод и робот едет влево.
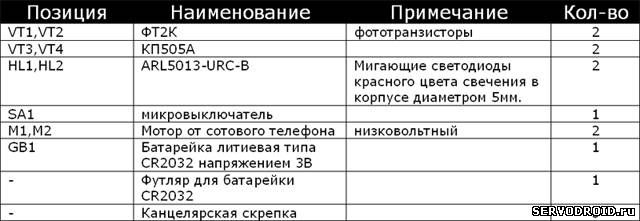
Материалы и инструменты:
— фототранзисторы типа ФТ-2К;
— мигающие светодиоды ARL5013-URC-B;
— один полевой транзистор КП505А;
— литиевая батарейка на 3В типа CR2032;
— футляр для горизонтальной установки;
— микровыключатель;
— два моторчика от мобильных телефонов.
Процесс изготовления:
Шаг первый. Добываем моторчики
Нужные моторчики можно найти в старых мобильных телефонах. Они здесь нужны для того, чтобы создавать вибрации, на их валы надеты эксцентрики. Самый ответственный здесь момент — это правильно снять эксцентрик. Если стягивать его плоскогубцами или иным подобным способом, моторчик придет в негодность. Для того чтобы снять эксцентрик, его нужно зажать в тиски или взять плоскогубцами. Далее берется шило или большая иголка и с помощью нее нужно выбить вал из эксцентрика. Работать нужно осторожно, так как можно легко повредить контакты или корпус моторчика.

Шаг второй. Создание печатной платы
На рисунке можно увидеть чертеж, какой должна быть печатная плата. При изготовлении платы есть один момент, речь идет о тонкой вертикальной линии, которая разделяет платы. При изготовлении платы методом ЛУТ или травления ее нужно изготавливать как одно целое.
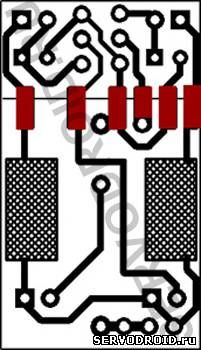
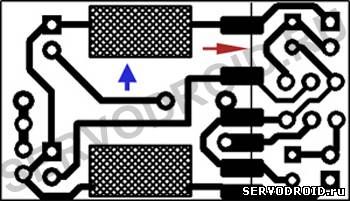
После того как в плате будут просверлены необходимые отверстия, ее можно разрезать по вертикальной линии, которая указана красной стрелкой. В итоге должно получиться две маленьких печатных платы. Что касается большой, то на ней располагается футляр, микровыключатель и двигатели. На второй же плате, та, которая поменьше, устанавливают радиодетали, это фототранзисторы, светодиоды и полевые транзисторы.
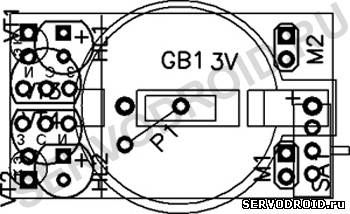
Особое внимание нужно уделить моменту установки фототранзисторов. Их нужно установить таким образом, чтобы длина выводов составила около 15мм, и после этого разогнуть в разные стороны на 30-35 градусов. Что касается перемычки Р1, то ее можно заменить любым кусочком провода. Перемычку нужно сделать раньше, чем будет установлен футляр, иначе после этого ее установка будет невозможной.
Еще один момент касается выключателя, он имеет три выхода. Центральный его вывод замыкается в зависимости от того, как расположена ручка-ползунок, это или правый или левый контакт. В цепи будет использоваться лишь два вывода, это центральный и любой боковой. Для того чтобы переключатель встал на свое место как положено, один его контакт нужно отрезать. Или же можно использовать иной микропереключатель небольших размеров.
Шаг третий. Установка двигателей
Двигатели устанавливаются на площадки со стороны токоведущих дорожек. Для крепления моторчиков автор использовал канцелярские скрепки. Ее нужно выгнуть в виде буквы П и затем залудить в необходимых местах. Впоследствии скрепка припаивается к площадке для монтажа двигателя.
Припаивать скрепку к двигателю нужно как можно быстрее, иначе моторчик может перегреться и выйдет из строя. Пайку лучше всего производить при помощи плоскогубцев. Далее моторчикам дают остыть и скрепки выгибают так, как это необходимо.
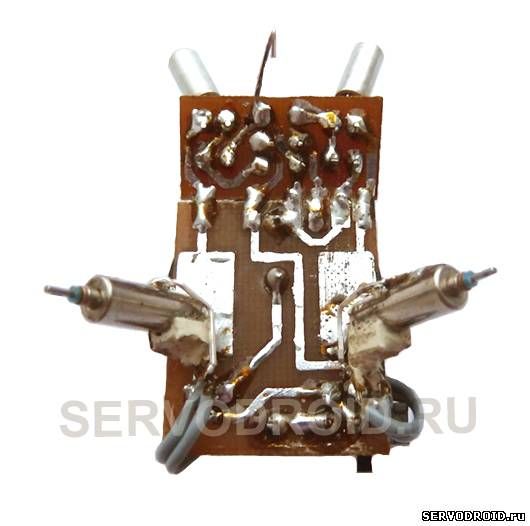
После того как моторчики будут установлены, их останется подключить. Для этого провода подключают к контактам платы М1 и М2. Лучше всего для подключения использовать тоненькие многожильные провода.
В заключении обе платы соединятся между собой. Малая плата ставится под углом к большей и затем припаивается. При этом нужно быть крайне осторожным, чтобы не замкнуть контакты.
Шаг четвертый. Заключительный этап
Теперь нужно создать для робота третью точку опоры. Для этих целей автор использовал контакт от конденсатора. Высоту ножки нужно подбирать индивидуально, от нее зависит центра масс и как следствие вся работа робота. Скорость робота можно регулировать путем изменения угла моторчиков.

Вот и все, робот готов. Теперь можно вставлять свежую батарейку, и наслаждаться работой самоделки.
Источник
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
МАЛЕНЬКИЙ САМОДЕЛЬНЫЙ РОБОТ
От обычных неподвижных фигурок, собранных из радиодеталей, решил плавно перейти к динамичным движущимся моделям. Это проект маленького самодельного робота на ИК-управлении, собранного из простых и доступных для приобретения деталей. В основе — два микроконтроллера. Передачу с пульта ДУ обеспечивает PIC12F675, а приёмная часть к контроллером моторчиков реализована на PIC12F629.
Схема ИК передатчика для робота

Схема робота на микроконтроллере

С цифровой частью всё вышло гладко, проблема была только в «двигательной установке» — маленьких редукторах, которые сделать в домашних условиях очень проблематично, поэтому пришлось развить идею «виброжуков«. Управление микромоторами осуществляется через усилительные транзисторные ключи на BC337. Они заменимы на любые другие небольшие транзисторы n-p-n с током коллектора от 0,5 А.

Размеры получились очень маленькие — на фото сравнение его с монетой и ещё возле спичечного коробка. Глаза робота сделаны из сверхярких светодиодов, засунутых в корпус небольших электролитических конденсаторов.

Что касается прошивки — это была одна их первых моих программ, так что код там «так себе». Если захотите повторить конструкцию, то его желательно переписать.

Видеоролик про самодельного робота
В общем получилась такая себе миниатюрная дистанционно управляемая игрушка. Для демонстрации можно сначала просто его показать без движения, а потом неожиданно активировать пультом и заставить двигаться 🙂 О других электронных поделках вы можете узнать зайдя на форум — в первом сообщении есть список всех работ. Надеюсь идея вам понравилась, с вами был ukrnano.
Форум по электронным самоделкам
Обсудить статью МАЛЕНЬКИЙ САМОДЕЛЬНЫЙ РОБОТ
radioskot.ru
робот под управлением вашего смартфона
Всем известно, роботы, даже очень крохотные, — удовольствие не из самых дешёвых. В основном, из-за дорогих электронных элементов, датчиков, процессоров, интерфейсов. Все эти устройства есть и в Вашем смартфоне – так зачем же переплачивать?
Всем известно, роботы, даже очень крохотные, - удовольствие не из самых дешёвых. В основном, из-за дорогих электронных элементов, датчиков, процессоров, интерфейсов. Все эти устройства есть и в Вашем смартфоне – так зачем же переплачивать? Так почему бы просто не подключить его к Вашему роботу? И вот эта идея реализуется — появляются один за другим роботы Romo, Botiful, Polaris. Сейчас уже на подходе – SmartBot от фирмы Overdrive Robotics.

Стандартная платформа смартбота (SmartBot) напомнит Вам тележку на двух колесиках. Он оснащен бортовым микропроцессорным блоком, динамиком, передними фарами на светодиодах, а также портом для обновления программного обеспечения (или для дополнительного подключения платы Arduino). Смартфон (на базе iOS, Android или Windows) необходимо ставить на клейкую, которая покрыта силиконом платформу, она установлена на передней панели (угол наклона можно регулировать). Его связь с роботом реализуется с помощью провода, который вставляется в гнездо чтобы подключить наушники.
В зависимости от производителя и модели телефона, Смартбот сможет обработать данные, определить местонахождение и проложить маршрут, воспроизвести и распознать речь и даже говорить.

Эти способности имеют зависимость от специального мобильного приложения. Вот пару задач, которые уже отработаны: управлять роботом на расстоянии в режиме реального времени (и смотреть «сквозь» его видеокамеру) с помощью второго смартфона, научить робота узнавать друзей и говорить с ними; просто отправить его в незнакомую компанию, чтобы SmartBot, с помощью ПО по распознаванию лиц, фотографировал их; и конечно, играть в самые разные игры.
Создатели побеспокоились о возможности подключения и дополнительного оборудования. Вы сможете приспособить сервомотор, захватывающее устройство, адаптер LEGO, ручку для рисования (которая позволит SmartBot рисовать по поверхности) и оружие стреляющее шариками.
Приобрести cмартбот можно будет уже в этом месяце, нужно лишь сделать предварительный заказ стоимость которого €165 (Европа) или $180 (США).
econet.ru